

_1679715011.png)
Send Mail
Visit ourLocations page for the location of the company nearest you.


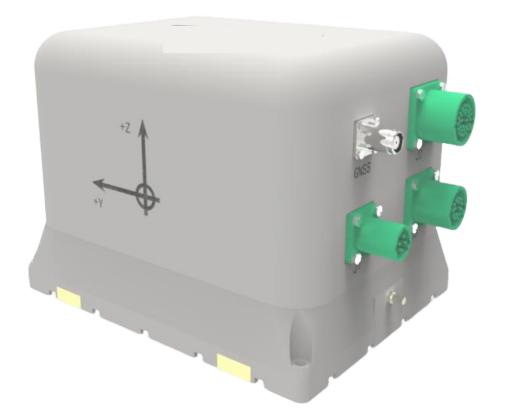
This product has a built-in high-precision three-axis integrated fiber-optic gyro, a small quartz flexure accelerometer and a mobile mapping-grade multi-mode and multi-frequency GNSS receiver that supports the autonomous BeiDou function. Through the advanced intelligent combination navigation algorithm and Kalman filter, optimized design for GNSS obstruction and multi-path interference, it can realize high-precision heading, attitude, speed and position measurement of moving carriers.
The inertial guidance system also has a variety of sensor interfaces, which can well meet the needs of long-time, high-precision and high-reliability navigation applications in complex environments such as urban canyons, and can be used for the navigation and control of various types of unmanned systems.
Fast and accurate determination of initial heading and attitude
Support real-time heading and attitude output
Built-in GPS, BeiDou dual-mode receiver
Dynamic fast alignment
INS/GNSS combination design
Support IE post-processing
Anti-electromagnetic interference and vibration
Enhanced Kalman filtering algorithm
Car Navigation
Airborne Navigation
Shipboard Navigation
Stabilization Control
| Combined inertial/satellite navigation accuracy | |
| Attitude Accuracy | ≤ 0.01° (1σ); |
| Pitch and roll: ≤0.04°(1σ) ; | |
| Positional Accuracy | Single-point positioning: Horizontal ≤1.5m, Elevation ≤3m (RMS, good satellite signal); |
| RTK: Horizontal ≤2cm+1ppm, Elevation ≤2cm+1ppm (RMS, good carrier phase differential link) | |
| Speed Accuracy | ≤0.02m/s(RMS,Carrier speed less than 500m/s) |
| Registration Time | ≤5min(static self-navigation) ≤1min(dual antenna assisted directional) |
| Rise and Sink | <5cm (lift <1m) or 5% (lift >1m) |
| Combined inertia/ODO/DVL accuracy | 0.5% x miles traveled (Depends on the accuracy of the external odometer) |